Приспособление для гибки полосы чертежи

Шаблон для гибки полосы (max 60х3)
Станок предназначен для изготовления скоб и хомутов различной формы квадратной, треугольной и многоугольной , используется на различных видах производства железобетонных конструкций и в строительстве. Гибка арматурной стали осуществляется с минимально возможным радиусом гиба и без изменения геометрии проката. Гибка арматуры осуществляется в ручном и полуавтоматическом режиме. Основная категория: Станки для работы с арматурой. Электромеханический гибочный станок серии «А16М В » сочетает в себе компактность и высокую производительность, скорость гибки достигает градусов в секунду, имеет две педали управления с возможностью регулировкой углов загиба по умолчанию углы настроены на 90 и градусов. Ручное и педальное управление.










![Гибка листового металла - методы и советы по проектированию [часть 2]](https://keyprod.ru/wp-content/uploads/2014/02/-Универсал-для-художественной-ковки-металла-e1439183724352.jpg "Ручное устройство для гибки полосы")


![Гибка листового металла - методы и советы по проектированию [часть 1]](https://vmasshtabe.ru/wp-content/uploads/2022/06/2458476-vms-Prisposoblenie-dlya-gibki-plastinyi-1SB-250x250.jpg "Технические характеристики GMS BT 24:")

Гибка - один из самых часто используемых способов обработки листового металла, также известный как прессование, отбортовка и фальцовка. Этот метод деформирует материал, придавая ему угловую форму, и широко применяется в различных отраслях промышленности. Для гибки применяется сила, которая должна превышать предел текучести материала, чтобы достичь пластической деформации и обеспечить стойкий результат изгиба. Чаще всего для гибки металла применяются листогибочные прессы с ЧПУ , которые отличаются высокой степенью точности и автоматизации в процессе выполнения операций. Эти современные прессы не только делают процесс гибки более точным, но и значительно повышают производительность и эффективность производственного процесса в целом. Благодаря возможности программного управления настройками и параметрами гибки, операторы могут легко настраивать пресс для выполнения различных задач, что делает их универсальными инструментами в металлообрабатывающей промышленности.




![Гибка листового металла - методы и советы по проектированию [часть 1] - Блог народные-окна42.рф](https://usamodelkina.ru/uploads/posts/2021-05/1620822749_77.jpg)

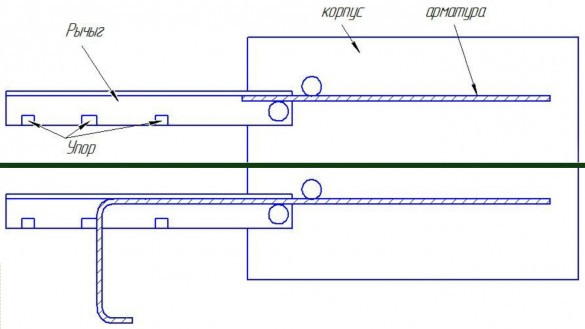
Приспособление для гибки полосы НТ2. Внешний вид и основные узлы приспособления для гибки полосы НТ2. Приспособление состоит из корпуса 5 , в котором закреплены два ведущих ролика 3 и один ведомый ролик 2.





